Friday, April 30, 2010
National Research & Innovation Competition
ZigBee application - autonomous robot will compete in National Research & Innovation Competition (NRIC) in 25 May 2010 at University Sains Malaysia (USM).. UniKL - BMI will send top 5 projects to participate in that competition.. University all around Malaysia will also take place in this competition.. The project need to be upgrade before going to the competition..
Saturday, April 24, 2010
No 3 out of 184 projects
During the top 20 demonstration on the staff cafe, this project voted for 3rd places.. The 1st place goes to earthquake detector i think and 2nd place is somekind of boiler..
Monday, April 19, 2010
Preparation for Top 20 Project Demonstration
Autonomous robot was selected to be top 20 list and need to do demonstration again on tuesday.. The purpose for this demonstration is to select the top 3 and the top 3 will win a prize.. Not much improvement or additional part was added on the project.. The project will be held in staff cafe from 8.30 am - 12 pm.. Hopefully the demonstration will successfully achieved the target.
Saturday, April 17, 2010
Project Presentation Done
The presentation was held at Dewan Gemilang BMI from 10am - 4pm.. It was done successfully after being judge by two lecturers which is Madam Hasmiza and Sir Alias.. The demonstration to school students also part of the program on that day..
Tuesday, April 6, 2010
Final Draft Report
All the draft from chapter 1- 5 need to be submitted to supervisor for checking purpose..The due date to submit the report is on 7 May..Right now, all the draft is completed.
Modification of Console Using I/O Active X

There is a slightly changes on the robot console..Before this I used MSComm as the serial communication, but i'm having problem on how to clear the buffer of the modem..The changes is only on the second form..By using Active X, the application is expanded but the program code is a bit complicated and long..
Wednesday, March 31, 2010
Robot Console with Visual Basic


The VB code still in development.. The MSCOMM is all done but the problem here is how to send string into the XBee modules..
Tuesday, March 30, 2010
Upgrading from ZNet 2.5 to ZB
These instructions pertain to any part number beginning “XB24‐B…” or “XBP24‐B…”
To upgrade your XBee ZNet 2.5 module to ZB, please do the following:
1. Ensure you have the latest version of X‐CTU installed (www.digi.com/xctu).
2. Ensure you have the latest available versions of ZB firmware by doing the following:
a) Open X‐CTU software to the “Modem Configuration” tab.
b) Click “Download new versions…” button and select ‘Web.’
c) Click “Done” when the action is finished.
3. Open X‐CTU software to the “PC Settings” tab.
4. Select the appropriate COM port and port settings (9600, 8, None, 1 are default), and
choose Flow Control: Hardware.
5. If upgrading firmware on a module running API firmware, place a check in the “Enable
API” checkbox.
6. Go to the “Modem Configuration” tab and select either “XB24‐ZB” or “XBP24‐ZB” from
the “Modem:” pull‐down menu, depending on whether you have an XBee or XBee‐PRO
module, respectively.
7. Select the desired firmware type from the “Function Set” pull‐down menu (Coordinator
API or AT, Router API or AT, or End Device API or AT).
8. Select the desired firmware version from the “Version” pull‐down menu (the version at
the bottom of the list is the latest).
9. Place a check in the “Always update firmware” checkbox.
10. Click the “Write” button.
Currently my XBee version and firmware does not support node discovery function because the XBee provided by Cytron is all 802.15.4 OEM modules not ZB OEM modules.. If my XBee ICs can be upgraded, the XBee will functioning same as wireless WiFi card to detect the wireless node but in different IEE address protocol..It can detect up to 65,000 wireless nodes..
To upgrade your XBee ZNet 2.5 module to ZB, please do the following:
1. Ensure you have the latest version of X‐CTU installed (www.digi.com/xctu).
2. Ensure you have the latest available versions of ZB firmware by doing the following:
a) Open X‐CTU software to the “Modem Configuration” tab.
b) Click “Download new versions…” button and select ‘Web.’
c) Click “Done” when the action is finished.
3. Open X‐CTU software to the “PC Settings” tab.
4. Select the appropriate COM port and port settings (9600, 8, None, 1 are default), and
choose Flow Control: Hardware.
5. If upgrading firmware on a module running API firmware, place a check in the “Enable
API” checkbox.
6. Go to the “Modem Configuration” tab and select either “XB24‐ZB” or “XBP24‐ZB” from
the “Modem:” pull‐down menu, depending on whether you have an XBee or XBee‐PRO
module, respectively.
7. Select the desired firmware type from the “Function Set” pull‐down menu (Coordinator
API or AT, Router API or AT, or End Device API or AT).
8. Select the desired firmware version from the “Version” pull‐down menu (the version at
the bottom of the list is the latest).
9. Place a check in the “Always update firmware” checkbox.
10. Click the “Write” button.
Currently my XBee version and firmware does not support node discovery function because the XBee provided by Cytron is all 802.15.4 OEM modules not ZB OEM modules.. If my XBee ICs can be upgraded, the XBee will functioning same as wireless WiFi card to detect the wireless node but in different IEE address protocol..It can detect up to 65,000 wireless nodes..
Sunday, March 28, 2010
Editting Servo Motor Speed Control
 Previously, the motor speed was 200 and changed to 255. The user can select the robot speed on the Visual Basic console.. In this case string "9" and "7" was reserved as a motor speed control.. Basically, when we increase the speed of motor of course it will required a lot of power.. So, it's recommended to use the "Normal Mode" if no speeding required..
Previously, the motor speed was 200 and changed to 255. The user can select the robot speed on the Visual Basic console.. In this case string "9" and "7" was reserved as a motor speed control.. Basically, when we increase the speed of motor of course it will required a lot of power.. So, it's recommended to use the "Normal Mode" if no speeding required..
Wednesday, March 24, 2010
Making poster

Poster specification
- Paper Size : A1
- Design must be in jpg format and saved in non-returnable CDROM (with name and Student ID no).
- Must be laminated
Contents of Poster :
1. Abstract (what and why?)
2. Advantages (benefits? novelty? marketability?)
3. Methods (how?)
4. Results (what happen?)
5. Analysis and Conclusion (so?)
6. References
Wireless Camera Concept
This video show the same concept that will be use for this robotic project unless its night vision mode..
Thursday, March 18, 2010
IO ActiveX Control

IO ActiveX Control is a software that can send string to microcontroller..Just assign the Communication Port and after that the string can be send..Right now, my laptop does not detect the Com Port for the SKXBEE module..If I selected another Com Port, it still said that this Com Port is in used..
Tuesday, March 16, 2010
Hardware Completed 90%
This is the hardware produced after completing the UV, etching and soldering procedure.. Actually the first concept is I try to mount the LCD on the board,but it burned due to overheating.. After that,as a safety precaution I used the connector and LCD stand to avoid the LCD from being burn for second time.. The robot is a bit heavy but the servo motor still capable to carry the load.. I need to think the way to put the camera on the robot cause the position of camera will effect the stabilization of mobile base.. The hardware still need to be touch up and covering the robot with something is a good idea I think.. Right now, I need to focusing more on Visual Basic development..


ROBOT BASE

COMPLETE ROBOT VIEW

BIRD EYES VIEW

PCB BOARD

ROBOT BASE

COMPLETE ROBOT VIEW

BIRD EYES VIEW
Thursday, March 11, 2010
PCB - 3 Dimension Visual

The 3D dimension can be obtained by using Proteus software..Just run the "ARES" application and view the output, after that click on the 3D icon..
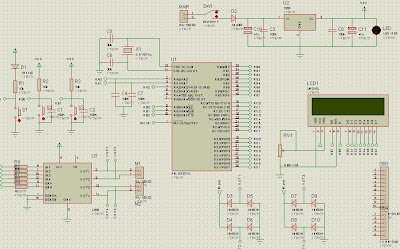
PCB Layout using Proteus

This circuit was design on Tuesday..The layout of the PCB designed using Proteus VSM software..The layout is on single layer only..This design contained 13 jumper wires..The board area is limited, so the design is compact..
Monday, March 8, 2010
Visual Basic 6.0 Controlled Robot
Right now, I'm start to learning how to use the VB software because I did not learn it before.. I'm planning to use VB as a Graphic User Interface (GUI) to control the robot..The hardest part is how to link the button into XCTU software..As i mentioned before, there are 4 button to control the direction of the motor which is forward, backward, right and left..I want to build a user interface as shown in the video below..
Thursday, March 4, 2010
Coordinating the motor

The robot uses the concept of two separate moving wheels. The table below shows the combination of the wheels to move the robot in the desired direction.
Motor Control Program
void forward ()
{
motor_ra = 0;
motor_rb = 1;
motor_la = 0;
motor_lb = 1;
}
void backward ()
{
motor_ra = 1;
motor_rb = 0;
motor_la = 1;
motor_lb = 0;
}
void left()
{
motor_la = 1;
motor_lb = 0;
motor_ra = 0;
motor_rb = 1;
}
void right()
{
motor_la = 0;
motor_lb = 1;
motor_ra = 1;
motor_rb = 0;
}
void stop()
{
motor_la = 1;
motor_lb = 1;
motor_ra = 1;
motor_rb = 1;
}
{
motor_ra = 0;
motor_rb = 1;
motor_la = 0;
motor_lb = 1;
}
void backward ()
{
motor_ra = 1;
motor_rb = 0;
motor_la = 1;
motor_lb = 0;
}
void left()
{
motor_la = 1;
motor_lb = 0;
motor_ra = 0;
motor_rb = 1;
}
void right()
{
motor_la = 0;
motor_lb = 1;
motor_ra = 1;
motor_rb = 0;
}
void stop()
{
motor_la = 1;
motor_lb = 1;
motor_ra = 1;
motor_rb = 1;
}
Final Report Writing
The final report need to be submitted by week 14 and the draft must be submit on week 8..It is a continuation of report draft form previous semester. This semester, I need to complete the Chapter 3- Materials and method, Chapter 4- Results and discussion and Chapter 5-conclusion..The report is still in progress and the project must be done 100% before completing final report.
Monday, March 1, 2010
Problem with hardware
The servo motor did not functioning according to plan..After troubleshooting,the output voltage coming out from L 298N is only 2V at connector M1 and there is no voltage at M2..I expect the diodes or the motor driver is broken..The expected component must be change to check where is the problem come from..
Wednesday, February 24, 2010
XBEE 3.3 V DC input voltage

XBee required 3.3 DC voltage to be operated..This low dc voltage can be obtained by converting 5V DC into 3V DC by feed the output of 5V to the voltage regulator LM317..This low voltage input is one of the advantages of using XBee in autonomous robot because the battery life time will be much more longer..
Monday, February 22, 2010
SKXBEE Mode in C Language
//Mode : Xbee
// Description : Control the robot using UART ( XBEE or an UART wireless module.
//======================================================
void wireless_xbee (void)
{
lcd_clr();
while(1)
{
lcd_goto (0);
if (data[0] == 100)
{
send_string(" XBEE CONTROL ");
SPEEDL = 200;
SPEEDR = 200;
while(1)
{
lcd_goto(20);
if (RCREG == '8')
{
forward();
send_string("FORWARD ");
}
else if (RCREG == '2')
{
backward();
send_string("BACKWARD ");
}
else if (RCREG == '6')
{
right();
send_string("TURN RIGHT ");
}
else if (RCREG == '4')
{
left();
send_string("TURN LEFT ");
}
else if (RCREG == '5')
{
stop();
send_string("INVALID COMMAND ");
}
else
{
stop();
send_string("INVALID COMMAND ");
}
}
}
else send_string("COMMAND");
}
}
// Description : Control the robot using UART ( XBEE or an UART wireless module.
//======================================================
void wireless_xbee (void)
{
lcd_clr();
while(1)
{
lcd_goto (0);
if (data[0] == 100)
{
send_string(" XBEE CONTROL ");
SPEEDL = 200;
SPEEDR = 200;
while(1)
{
lcd_goto(20);
if (RCREG == '8')
{
forward();
send_string("FORWARD ");
}
else if (RCREG == '2')
{
backward();
send_string("BACKWARD ");
}
else if (RCREG == '6')
{
right();
send_string("TURN RIGHT ");
}
else if (RCREG == '4')
{
left();
send_string("TURN LEFT ");
}
else if (RCREG == '5')
{
stop();
send_string("INVALID COMMAND ");
}
else
{
stop();
send_string("INVALID COMMAND ");
}
}
}
else send_string("COMMAND");
}
}
Thursday, February 11, 2010
Range Test for XBee
Range test can be done via XCTU software by simply clicking the range test tab..The range test tab is designed to verify the range of the radio link by sending a user specified data packet and verifying the response packet is the same, within the time specified. For performing a standard range test, there are several steps that must be followed..
1: Configure the Base with API enabled and a unique 16 bit or 64 bit source address. 2: Configure the remote radio with a unique source address and set the Destination address to equal the Base radio’s source address.
3: Enable the API option of the X-CTU on the PC Settings tab and connect the base radio to the PC.
4: Connect the red loopback adapter to the remote radio and place them a distance apart.
5: Enter either the 16 bit or 64 bit destination address of the remote radio into the Destination Address box on the Range Test tab.
6: Create a data packet of your choosing by typing in the data in the Transmit box
7: To start a Range test, click on Start.

You will notice the TX failures, Purge, CCA, and ACK messages will increment accordingly while the range test is performed. To stop a range test, click on the Stop button. The problem now is, i cannot perform the range test due to some error. I followed all the instructions but there is an error which is "timeout waiting for data".I'm still thinking on how to overcome this error..
1: Configure the Base with API enabled and a unique 16 bit or 64 bit source address. 2: Configure the remote radio with a unique source address and set the Destination address to equal the Base radio’s source address.
3: Enable the API option of the X-CTU on the PC Settings tab and connect the base radio to the PC.
4: Connect the red loopback adapter to the remote radio and place them a distance apart.
5: Enter either the 16 bit or 64 bit destination address of the remote radio into the Destination Address box on the Range Test tab.
6: Create a data packet of your choosing by typing in the data in the Transmit box
7: To start a Range test, click on Start.

You will notice the TX failures, Purge, CCA, and ACK messages will increment accordingly while the range test is performed. To stop a range test, click on the Stop button. The problem now is, i cannot perform the range test due to some error. I followed all the instructions but there is an error which is "timeout waiting for data".I'm still thinking on how to overcome this error..
Tuesday, February 9, 2010
Testing to connect the SKXBEE in single PC.
To test the XBee modules, we can test the communication by using 1 PC only..Just open 2 X-CTU software and click on different com port..In this case, click on com port 10 & 11..

After that,click at moderm configuration and click read the check the version and address of the XBEE..Key in value "2222" at destination address low and "1111" at 16-bit source address for com port and 10 and vice versa for com port 11.

Click write for both com port the store the address at XBEE and this may take 30 seconds to complete..After the moderm is connected to each other, try the terminal bar to see the flow of communication..The blue colour represent the transmitted data while the red colour represent received data..If the communication testing between XBEE is completed, we can proceed to the next step which communication via microcontroller..


After that,click at moderm configuration and click read the check the version and address of the XBEE..Key in value "2222" at destination address low and "1111" at 16-bit source address for com port and 10 and vice versa for com port 11.

Click write for both com port the store the address at XBEE and this may take 30 seconds to complete..After the moderm is connected to each other, try the terminal bar to see the flow of communication..The blue colour represent the transmitted data while the red colour represent received data..If the communication testing between XBEE is completed, we can proceed to the next step which communication via microcontroller..

Updating X-CTU Firmware

The 2 pieces of SKXBEE had been received on Tuesday..According to them,the SKXBEE firmware is corrupted..Their install back the firmware to the latest version which is 10-CD..The current XCTU software does not support this latest version and in order to detect the SKXBEE I updated the version of firmware..This can be done by clicking on "moderm configuration" and then click download new version via web..It takes time to update the firmware..
Monday, February 8, 2010
Mobile Robot Platform by Cytron.
Almost every major university has one or more labs that focus on mobile robot research..In UniKL-Bmi also there has been several researchs on mobile robot including my project..Recently,Cytron tech designed a Mobile Robot Platform (MRP) for an educational platform for research purpose. It is designed to easily customizable, functionalities expandable that provides total flexibility for robotic application testing and development. MRP use Compaq Presario CQ20 as a main processor and powered by 2 12V 7Ah Sealed Lead Acid Battery..The actuator is 2 DC brushless motors and laser range finder as a sensor..
In terms of application, MRP can be used as guide, receptionist, waiter/waitress, mobile clone, surveillance, delivery and surveying robot. The robot is being control by remote PC through WiFi..
In terms of application, MRP can be used as guide, receptionist, waiter/waitress, mobile clone, surveillance, delivery and surveying robot. The robot is being control by remote PC through WiFi..
Wednesday, February 3, 2010
Testing the wireless camera

The wireless camera testing was done and there is no problem faced..The receiver must be connected to TV card and then the TV card is connected to USB port laptop..USB TV Card was choosen because its the only way to connect a wireless camera to a laptop..There is no RGB port build for laptop and USB TV card is the solution..The camera transmitter is connected to the robot base..The system is seperate, the camera will use it own transmitter device..Soon, the laptop can record all the video that had been captured by the camera and it can be use as a surveillance system.


Thursday, January 28, 2010
Repairing the SKXBee modules
Cytron just give me a feedback and the SKXBEE must be sent to them for repairing purpose..It said that it will take a week to repair it and there is nothing i can do except concentrating on software and hardware (robot)..I hope Cytron will repair my SKXBee as soon as possible.
Hardware construction

I was constructing multifunction mobile robot (PR23) by cytron..This is the robot base that i will used in my project..The construction is 80% done..This robot will soon be operating in 2 modes which is line following robot and wireless robot using controller XBE..I'm planning on putting a wireless camera on my robot..

Monday, January 25, 2010
Problems with SKXBEE modules
The XCTU software did not detect my SKXBEE module..It is hard for me to write any instruction to the moderm..Problem had been send to Cytron for further information..The problem occur when I start to write the instruction to the XBEE..I hope my SKXBEE is not damage and can be repaired..
Wednesday, January 20, 2010
Purchase component from cytron
Some of the part and components for this project was purchased online from cytron company..The components are such as SKXBee 2pcs, servo motor 2pcs, PIC 16F877A 1 pcs, electronics part, mobile robot base..The delivery is on Friday..By that time, i can start assemble and testing my SKXBee devices..
Development of hardware
This week I was doing circuit designing using proteus software..The circuit that in development is microcontroller circuit to control the robot and SKXBee..It is a bit hard to make the PCB layout because some of the component was not in the Proteus Libary..Some of the part is a bit different such as LCD pins..They just provide the schematic design only but not the PCB layout for example LED..I think by now, the circuit layout is 70% completed.

Monday, January 18, 2010
Enquiry about microcontroller..
I submitted enquiry to cytron on how much microcontroller required to control the robot..They answered SKXBee can either be connected to microcontroller or USB of computer. In PR23 product by cytron case, one SKXBee is connected to PR23 another one is connected to computer USB port. Further action will be taken after discussing with project supervisor..
Wednesday, January 13, 2010
Microcontroller on 2 different board..
In this project..The controller at the TX&RX at PC and TX&RX at robot point is a bit different..This is because controller at PC only interface with XBee and LCD only..While on the robot,the controller will interface with motors,sensors,LCD and any additional applications..It is a bit tough to make a small controller circuit to be fitted on the robot base..I will make it smaller as possible..This is to ensure that the robot did not carry too much load on top of it..PR 23 by cytron is a good example to follow..Because its provide head to toe instruction on how to build a robot..
Tuesday, January 12, 2010
Final Year Project 2nd Briefing..
The briefing was held in TTL 1 for about a hour..It was conducted by FYP committee..The briefing told us on how to write a quality report, the flow of the project and the duration..The presentation & demo is on 13th April (week 13) at gemilang hall from 10am-5pm..During the presentation, the representative from UniKL ICC will be invited for project commercilization..Poster is a need during the presentation and must be verified first from the supervisor..30% is the marks for the perfect presentation..During week 14, we must submit hardcover & softcopy thesis and logbook which is 25% marks both..
Saturday, October 31, 2009
Submission of draft and Log book
The draft and log book for Final Year Project was submitted on week 13 (23/10/2009). The draft consist of Chapter I & II. Chapter I is Introduction and chapter II is Literature Review. Percentage mark for draft is 5% and log book is 10%.
Thursday, October 22, 2009
Test Method on Add-on SKXBEE
1. Configure the ATMY 1111 to SKXBEE for the robot and ATDL 1111 to SKXBEE for computer using X-TCU (refer User’s manual for SKXBEE section 6.2 for more detail on configuration).
2. Plug in the SKXBEE to the robot and switch ON the power, select “SKXBEE.”
3. Connect another SKXBEE on computer.
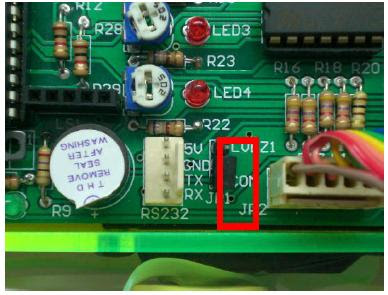
4. Make sure JP1 jumper is connected to COM for UART as shown in Figure.
5. Open X-TCU and click on the terminal, type “d”.
6. Now, user may control the robot using Num pad. 8 to move forward, 4 to turn left, 6 to turn right, and 2 to move backward.
2. Plug in the SKXBEE to the robot and switch ON the power, select “SKXBEE.”
3. Connect another SKXBEE on computer.
4. Make sure JP1 jumper is connected to COM for UART as shown in Figure.
5. Open X-TCU and click on the terminal, type “d”.
6. Now, user may control the robot using Num pad. 8 to move forward, 4 to turn left, 6 to turn right, and 2 to move backward.

Interface XBee Module with PIC Microcontroller
5V and ground is connected to provide power to the module. While TX and RX pin is connected for communication. JP1 jumper is connected at COM for interfacing SKXBEE.

Below is the system overview on how XBee communicate with microcontroller. The XBee will connected to the microcontroller via Universal Asynchronous Receiver/transmitter (UART) pins.

SKXBEE can be add on in the microcontroller circuit. It will lifted a bit high from microcontroller circuit or in other words above the microcontroller circuit. All we need to used is a female header.




Below is the system overview on how XBee communicate with microcontroller. The XBee will connected to the microcontroller via Universal Asynchronous Receiver/transmitter (UART) pins.

SKXBEE can be add on in the microcontroller circuit. It will lifted a bit high from microcontroller circuit or in other words above the microcontroller circuit. All we need to used is a female header.



Thursday, October 15, 2009
100+ node ZigBee PRO network
Demonstrates how a network of ZigBee PRO nodes based on embedded AVR microcontrollers and Atmel RF transceivers and running BitCloud stack assembles itself in a dense network setting. Provides visual overview of test network environment and WSN Monitor tool for network visualization and control.
This is an example of advanced programming for ZigBEE network..
This is an example of advanced programming for ZigBEE network..
Zigbee / XBee Adapter Configuration Tutorial
This tutorial shows how two XBee Modules can be configured to be able to talk to each other. These modules are ideal for any hobby/school/university project. With these modules it is very easy to interface PC to Microcontroller board, or Microcontroller to Microcontroller over wireless link.
Subscribe to:
Comments (Atom)

 Atom Feed (xml)
Atom Feed (xml)